Rastreador com GPS "Saltando": Como filtrar o ruído de posição estática
Mesmo parado, seu veículo parece se mover no mapa. Entenda o fenômeno do "GPS Drift" e como a inteligência de software da Ikonn elimina esse ruído para garantir dados impecáveis.
O Fenômeno do "GPS Drift": Por que o mapa nunca para quieto?
Para quem busca a perfeição na gestão de frotas, poucas coisas são tão irritantes quanto observar um veículo estacionado que, no mapa, continua gerando pequenos deslocamentos, criando um "novelo de lã" digital em torno de sua posição real. Esse fenômeno, conhecido tecnicamente como GPS Drift (ou "Deriva de GPS"), não é uma falha do rastreador, mas uma característica intrínseca da tecnologia GNSS.
O receptor GPS está constantemente recalculando sua posição com base em sinais de rádio que viajam 20.000 km através da atmosfera. Variações na ionosfera, reflexões de sinal em prédios próximos (multipath) e a própria margem de erro natural dos módulos civis (tipicamente entre 2,5m e 10m) fazem com que cada cálculo seja ligeiramente diferente do anterior. Se o software não intervir, essa variação matemática é interpretada como movimento físico, gerando dados falsos de odômetro e alertas de cerca virtual indevidos.
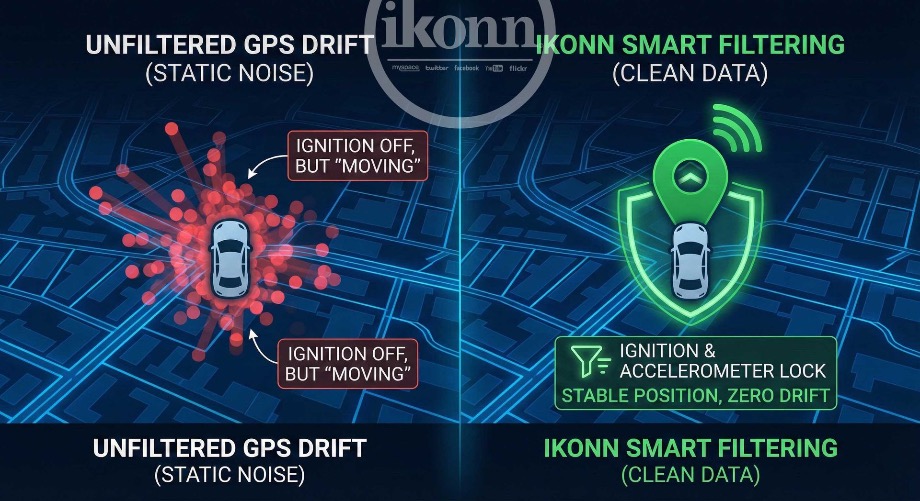
A Solução Ikonn: Filtragem Inteligente na Camada de Software
Manter os dados em "estado de novo" significa não aceitar ruído como informação. A abordagem de engenharia da Ikonn para combater o GPS Drift baseia-se em uma filtragem multicamadas que valida se o movimento reportado pelo hardware é real ou apenas um artefato matemático.
A primeira e mais crítica camada de defesa é a Lógica de Ignição. Se o fio pós-chave (ACC) indica que o motor está desligado, a plataforma Ikonn entende que o veículo não deve estar se movendo por meios próprios. O sistema então "congela" a última posição válida conhecida e ignora as flutuações menores enviadas pelo GPS, mantendo o ícone do veículo estático no mapa.
O Papel do Acelerômetro na Validação de Movimento
E se o veículo for guinchado com a ignição desligada? A lógica de ignição sozinha falharia. É aqui que entra a segunda camada de automação: o Acelerômetro 3D (Sensor de Movimento).
O Motor de Regras da Ikonn cruza a informação do GPS com a do acelerômetro. Se o GPS reporta um deslocamento de 5 metros, mas o acelerômetro não detectou nenhuma vibração física correspondente a um veículo em movimento, o sistema classifica aquele ponto como ruído e o descarta. Por outro lado, se o acelerômetro detecta movimento contínuo sem ignição, ele dispara um alerta de reboque e libera a atualização da posição GPS, garantindo a segurança sem sacrificar a precisão dos dados estáticos.
Filtros de Velocidade e HDOP: Refinando a Precisão
Além dos sensores físicos, aplicamos filtros lógicos baseados na qualidade do dado. O Filtro de Velocidade Mínima ignora qualquer pacote de posição que reporte uma velocidade inferior a um limiar configurável (ex: menos de 3 km/h), tratando-o como "parado".
Simultaneamente, o filtro de HDOP (Horizontal Dilution of Precision) descarta pontos onde a geometria dos satélites estava desfavorável, o que matematicamente aumenta a margem de erro. Essa combinação de filtros garante que apenas dados de alta fidelidade sejam processados, alimentando os relatórios de gestão com informações que refletem a realidade física, não as imperfeições do sinal de rádio.
Conclusão: Dados Limpos para uma Gestão Eficiente
O combate ao GPS Drift é um exemplo perfeito de como a engenharia de software agrega valor ao hardware bruto. Ao aplicar uma filtragem inteligente, a Ikonn transforma um sinal inerentemente ruidoso em um rastro digital limpo, estável e confiável. Isso permite que sua central automatize processos e confie nas métricas de frota sem a necessidade de higienização manual de dados, mantendo a operação eficiente e escalável.
IKONN SUPPORT: A inteligência que separa o movimento real do ruído digital.
Seus relatórios de quilometragem estão inflados pelo ruído de GPS?
Consulte nossa equipe de engenharia para ajustar os filtros de estática (Static Drift) da sua frota e garanta que seus dados de posição reflitam apenas a realidade física do veículo.