GPS Tracker "Jumping": How to Filter Static Position Noise
Even when stationary, your vehicle appears to move on the map. Understand the phenomenon of "GPS Drift" and how Ikonn's software intelligence eliminates this noise to ensure flawless data.
The "GPS Drift" Phenomenon: Why does the map never stay still?
For those seeking perfection in fleet management, few things are as irritating as observing a parked vehicle that, on the map, continues to generate small displacements, creating a digital "ball of yarn" around its real position. This phenomenon, technically known as GPS Drift , is not a tracker malfunction, but an intrinsic characteristic of GNSS technology.
The GPS receiver is constantly recalculating its position based on radio signals that travel 20,000 km through the atmosphere. Variations in the ionosphere, signal reflections from nearby buildings (multipath), and the natural margin of error of civilian modules (typically between 2.5m and 10m) cause each calculation to be slightly different from the previous one. If the software does not intervene, this mathematical variation is interpreted as physical movement, generating false odometer readings and unwarranted geofence alerts.
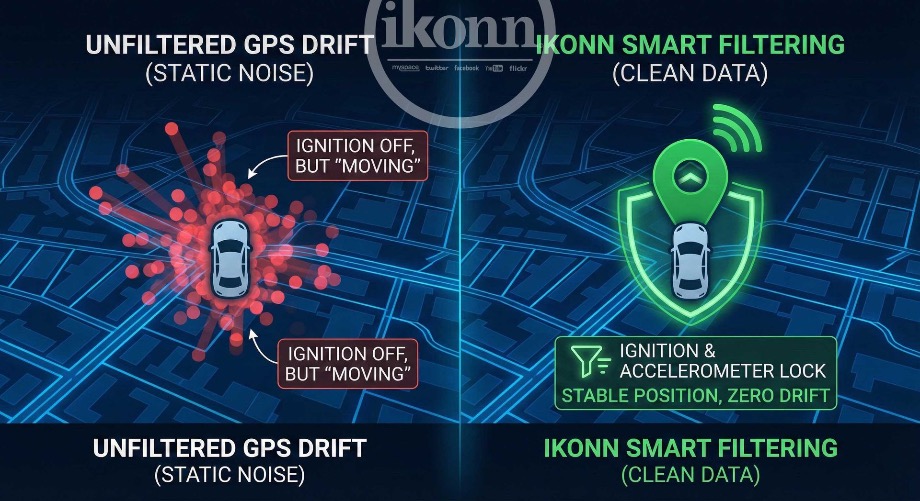
The Ikonn Solution: Intelligent Filtering at the Software Layer
Maintaining data in a "new state" means not accepting noise as information. Ikonn's engineering approach to combat GPS drift relies on multi-layered filtering that validates whether the movement reported by the hardware is real or merely a mathematical artifact.
The first and most critical layer of defense is the Ignition Logic . If the ignition switch (ACC) indicates that the engine is off, the Ikonn platform understands that the vehicle should not be moving under its own power. The system then "freezes" the last known valid position and ignores minor fluctuations sent by the GPS, keeping the vehicle icon static on the map.
The Role of the Accelerometer in Motion Validation
What if the vehicle is towed with the ignition off? The ignition logic alone would fail. This is where the second layer of automation comes in: the 3D Accelerometer (Motion Sensor) .
Ikonn's Rules Engine cross-references GPS information with accelerometer data. If the GPS reports a displacement of 5 meters, but the accelerometer does not detect any physical vibration corresponding to a moving vehicle, the system classifies that point as noise and discards it. On the other hand, if the accelerometer detects continuous movement without ignition, it triggers a towing alert and releases the GPS position update, ensuring safety without sacrificing the accuracy of static data.
Velocity and HDOP Filters: Refining Precision
In addition to physical sensors, we apply logical filters based on data quality. The Minimum Speed Filter ignores any position packet that reports a speed below a configurable threshold (e.g., less than 3 km/h), treating it as "stationary".
Simultaneously, the HDOP (Horizontal Dilution of Precision) filter discards points where the satellite geometry was unfavorable, which mathematically increases the margin of error. This combination of filters ensures that only high-fidelity data is processed, feeding management reports with information that reflects physical reality, not the imperfections of the radio signal.
Conclusion: Clean Data for Efficient Management
Combating GPS drift is a perfect example of how software engineering adds value to raw hardware. By applying intelligent filtering, Ikonn transforms an inherently noisy signal into a clean, stable, and reliable digital trail. This allows your control center to automate processes and rely on fleet metrics without the need for manual data cleansing, keeping operations efficient and scalable.
IKONN SUPPORT: The intelligence that separates real movement from digital noise.
Are your mileage reports inflated by GPS noise?
Consult our engineering team to adjust your fleet's static drift filters and ensure your position data accurately reflects the vehicle's physical reality.