Rastreador GPS "saltando": Cómo filtrar el ruido de posición estática
Incluso estando parado, su vehículo parece moverse en el mapa. Comprenda el fenómeno de la "deriva del GPS" y cómo la inteligencia del software de Ikonn elimina este ruido para garantizar datos impecables.
El fenómeno de la “deriva del GPS”: ¿por qué el mapa nunca permanece quieto?
Para quienes buscan la perfección en la gestión de flotas, pocas cosas son tan irritantes como observar un vehículo estacionado que, en el mapa, continúa generando pequeños desplazamientos, creando una maraña digital alrededor de su posición real. Este fenómeno, conocido técnicamente como deriva GPS , no es un mal funcionamiento del rastreador, sino una característica intrínseca de la tecnología GNSS.
El receptor GPS recalcula constantemente su posición basándose en señales de radio que recorren 20.000 km a través de la atmósfera. Las variaciones en la ionosfera, las reflexiones de las señales de los edificios cercanos (multitrayecto) y el margen de error natural de los módulos civiles (normalmente entre 2,5 m y 10 m) hacen que cada cálculo sea ligeramente diferente del anterior. Si el software no interviene, esta variación matemática se interpreta como movimiento físico, generando lecturas falsas del odómetro y alertas de geocercas injustificadas.
La solución Ikonn: filtrado inteligente en la capa de software
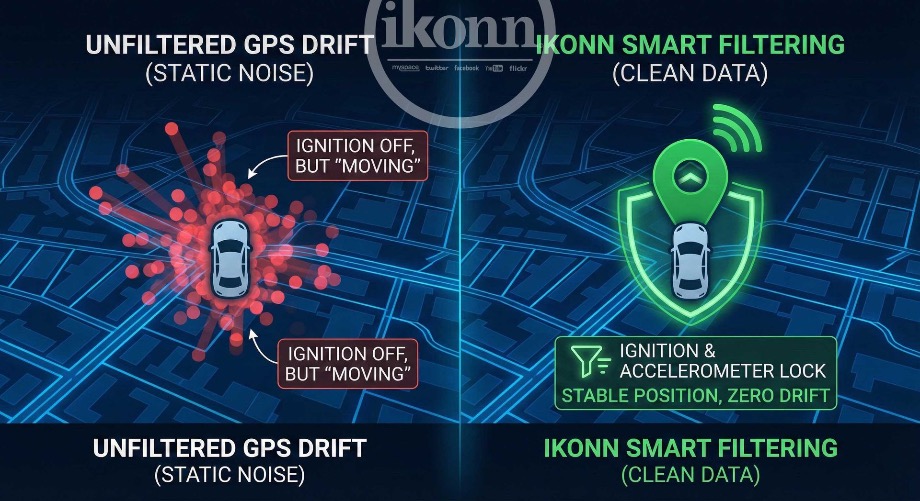
Mantener los datos en un "estado nuevo" significa no aceptar el ruido como información. El enfoque de ingeniería de Ikonn para combatir la desviación del GPS se basa en un filtrado multicapa que valida si el movimiento reportado por el hardware es real o simplemente un artefacto matemático.
La primera y más crítica capa de defensa es la lógica de encendido . Si el interruptor de encendido (ACC) indica que el motor está apagado, la plataforma Ikonn entiende que el vehículo no debería moverse por sí solo. El sistema entonces "congela" la última posición válida conocida e ignora las pequeñas fluctuaciones enviadas por el GPS, manteniendo el icono del vehículo estático en el mapa.
El papel del acelerómetro en la validación del movimiento
¿Qué pasa si el vehículo se remolca con el encendido apagado? La lógica de encendido por sí sola fallaría. Aquí es donde entra en juego la segunda capa de automatización: el acelerómetro 3D (sensor de movimiento) .
El motor de reglas de Ikonn cruza la información del GPS con los datos del acelerómetro. Si el GPS informa un desplazamiento de 5 metros, pero el acelerómetro no detecta ninguna vibración física correspondiente a un vehículo en movimiento, el sistema clasifica ese punto como ruido y lo descarta. Por otro lado, si el acelerómetro detecta movimiento continuo sin encendido, activa una alerta de remolque y publica la actualización de la posición GPS, garantizando la seguridad sin sacrificar la precisión de los datos estáticos.
Filtros de velocidad y HDOP: refinando la precisión
Además de los sensores físicos, aplicamos filtros lógicos basados en la calidad de los datos. El filtro de velocidad mínima ignora cualquier paquete de posición que indique una velocidad inferior a un umbral configurable (p. ej., menos de 3 km/h), tratándolo como "estacionario".
Simultáneamente, el filtro HDOP (Dilución Horizontal de la Precisión) descarta los puntos donde la geometría del satélite era desfavorable, lo que aumenta matemáticamente el margen de error. Esta combinación de filtros garantiza que solo se procesen datos de alta fidelidad, alimentando los informes de gestión con información que refleja la realidad física, no las imperfecciones de la señal de radio.
Conclusión: Datos limpios para una gestión eficiente
Combatir la desviación del GPS es un ejemplo perfecto de cómo la ingeniería de software aporta valor al hardware básico. Mediante la aplicación de filtrado inteligente, Ikonn transforma una señal inherentemente ruidosa en un registro digital limpio, estable y fiable. Esto permite a su centro de control automatizar procesos y basarse en las métricas de la flota sin necesidad de depurar manualmente los datos, manteniendo así la eficiencia y la escalabilidad de las operaciones.
SOPORTE IKONN: La inteligencia que separa el movimiento real del ruido digital.
¿Sus informes de kilometraje están inflados por el ruido del GPS?
Consulte con nuestro equipo de ingeniería para ajustar los filtros de deriva estática de su flota y garantizar que sus datos de posición reflejen con precisión la realidad física del vehículo.